I work on robotics and autonomous driving. I envision an end-to-end system take rich 3D data and perform efficent 3D scene understanding. I believe the future lies in lifelong learning and long-term SLAM.

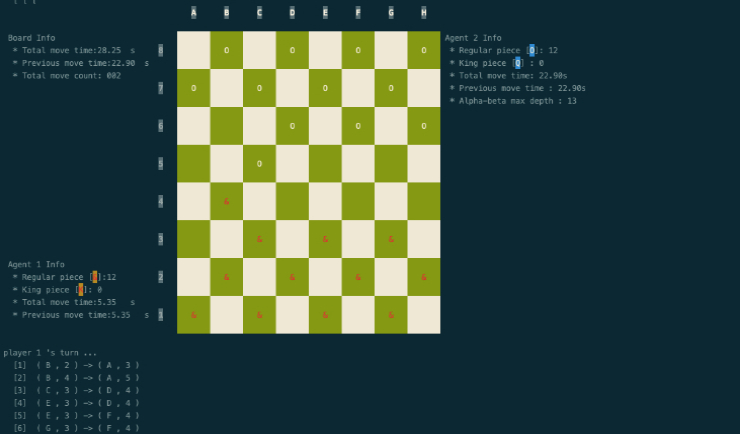
Learning to drive safely with Reinforcement Learning
With Research & Development on the Autonomous Driving field growing readily, a lot of concerns have been raised for the safety of such an autonomous agent.
In this work, we want to leverage the power of reinforcement learning to make the self driving agent be aware of the context and make the safest behavior decisions with the sensor information.
The agent would be able to perform point-to-point navigation under different scenarios including pedestrian avoidance, lane changing and intersection negotiation while keeping the passenger safe.
Being one of the capstone projects in MRSD program 2019 -2021, we also aims to package this algorithm into a software product as a predictive safety algorithm. For vehicle manufacturers who require intelligent road safety systems, this package delivers an accurate on-road contextual awareness and prediction algorithm that integrates with their existing hardware to keep customers safe from complex safety incidents.
Karthik Arcot, Alvin Huang, Zhekai Jin, Rohan Pandya, Mayank Singal
Presentation •
Webpage •
Video •
Code (Github)
The Cooper Mapper: Cost-friendly Autonomous driving Research Platform for MultiSensor Data Fusion, SLAM, etc.
To make robots generally useful in the broader world, in applications like autonomous driving, urban search and rescue, AI-assisted precision agriculture, etc., they need to operate in large, three dimensional and potentially unstructured environments.
Therefore, they need general algorithms for mapping, localizing, planning and exploring that work just about anywhere.
In this work, we are working toward a general Simultaneous Localization and Mapping (SLAM) solution that fully leverages the advantages of Lidar and Stereo Camera,
has constant computation time (real-time) and linear in storage space, and utilizes efficient map representation which will be fully 3D and capable of representing arbitrary 3D geometry at a proper level of resolution.
Our work is aiming to be an extension of Active SLAM with an efficient multisensor data fusion model to allow accurate mapping, global loop closure and large-scale online SLAM for challenging and complicated environment.
Zhekai Jin, Yifei Shao, Minjoon So, Carl Sable, Neveen Shlayan
IEEE Intelligent Transportation Systems Conference (ITSC) 2019
★ 1st Place in the IEEE Region 1 2019 Student Papers Competition ★
Webpage •
PDF(Draft) •
Report •
Code (Github) •
SLAM in 5 MINS
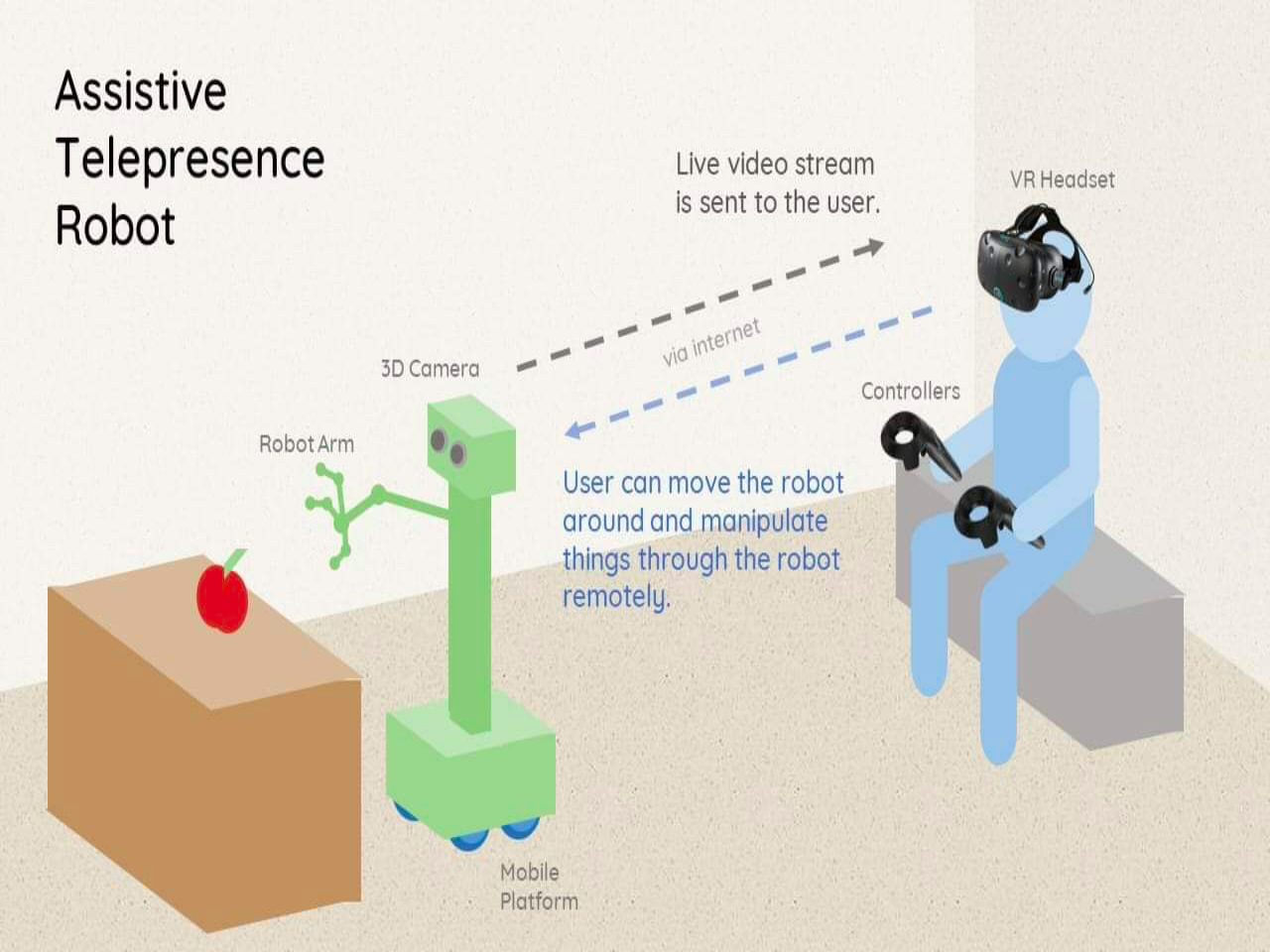
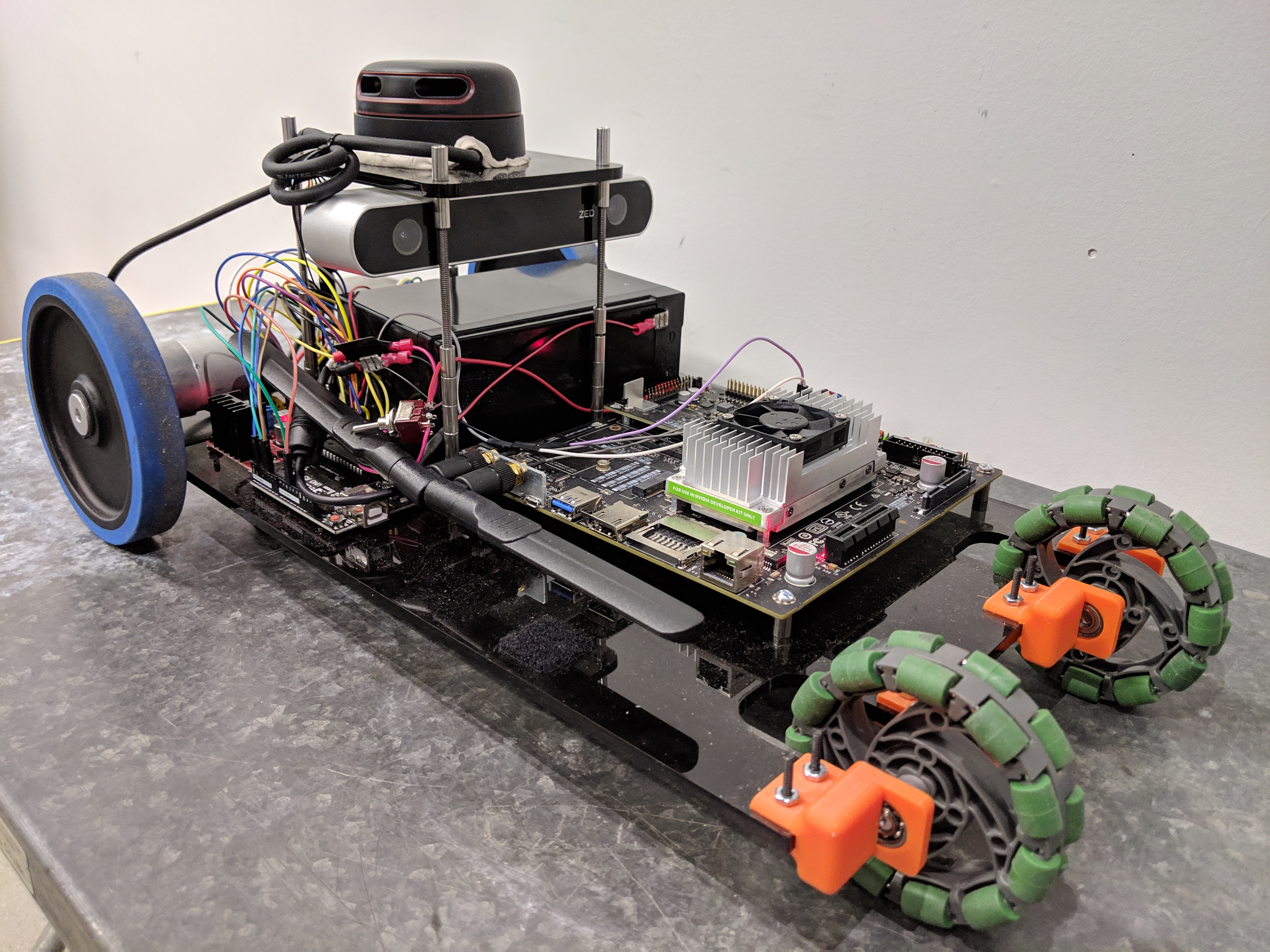
VR-TELE: Realization of 3D Telepresence with HTC Vive and Raspberry Pi
This project aims to build a realization of the abstract idea “3D Telepresence” by the aid of microcontroller (Raspberry Pi) and the Head Mounted Display ( HTC Vive) and additional hardware.
The idea is to make a wireless connected robot platform, mimicking the observer’s perspective to capture its ambient environment and feeding it into observer’s HMD, which therefore allows the observer to fully perceive device’s surrounding as if he or she is in the device’s position.
A real scale environment of the robot is reconstructed to the user, with the user's motion reflected on the mobile device in real time.
The applications of this work range from basic tasks like monitoring to highly expendable functions like bomb disposal.
My work involves stages of web development, time-constrained pose estimation,
efficient 3D metric map representations, stereo SLAM, and data transmission & encryption.
Principal Investigator: Dr. Neveen Shlayan
Zhekai Jin, Simon Shao, and Rafi Mueen
Webpage •
Partial code release (Github) •
Hardware Setup Guide

The Cooper IoT: Generic Distributed IoT Platform for human traffic monitoring
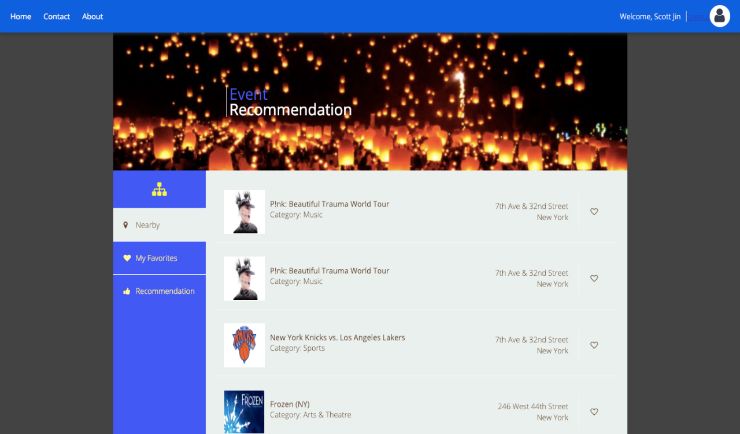
We propose utilizing Bluetooth/WiFi technology to estimate origin-destination (OD) demands and station wait times of users of any public transportation system.
If the entrance and exit turnstiles at subway stations are equipped with Bluetooth/WiFi receivers,
it is possible to capture OD information for some percentage of the riders with visible Bluetooth/WiFi devices.
The riders who have electronic devices such as most cell phones, iPods, and computers carry unique information in their devices’ Bluetooth/WiFi MAC address.
This information can be used scrambled and used anonymously to detect the origin and destination of riders by matching data collected at entrances and exits from the system.
I implemented real-time WiFi-and-Bluetooth-address-based position tracking and human detection algorithms to monitor human traffic flow and performed time-series analysis with a stochastic queuing model.
Principal Investigator: Dr. Neveen Shlayan
Zhekai Jin, Jialun Bao, and Rafi Mueen
Webpage •
Publication •
Report •
Code (Github)
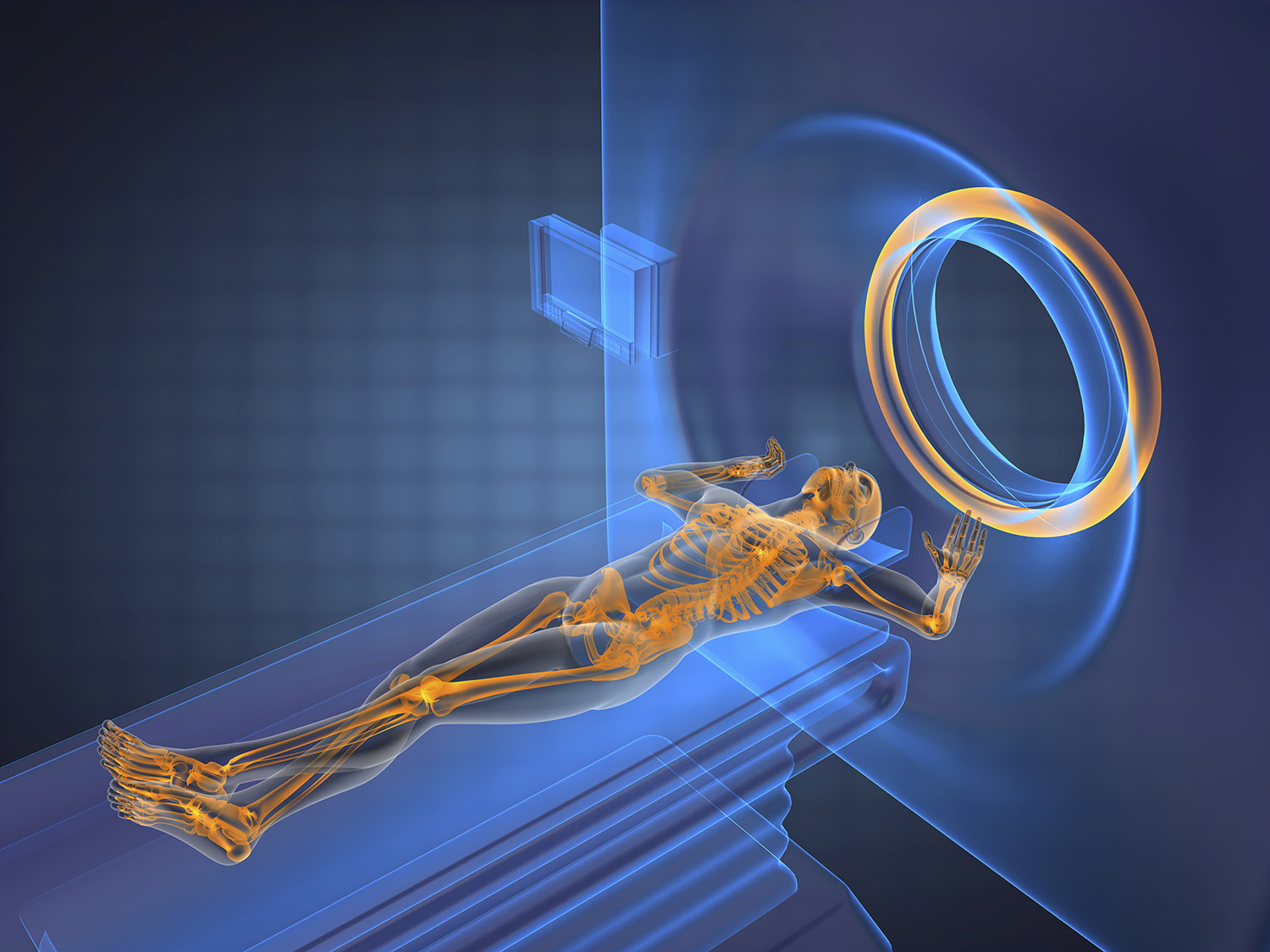
The Principles of MRI and Analysis of the Adoption of MRI in China
This work explores the technical principles of Magnetic Resonance Imaging (MRI), its medical applications and its particular usage in China.
I delved into the details of Nuclear Magnetic Resonance (NMR) technology with its relations to the MRI. Then I discussed the advantages and limitation of the MRI,
in close comparison to X-ray and computerized tomography (CT). And an insight into China's MRI usage is provided.
Principal Investigator: Dr. Robin Kinnel
Zhekai Jin
Menuscript